








中国农业科技导报 ›› 2025, Vol. 27 ›› Issue (5): 113-121.DOI: 10.13304/j.nykjdb.2023.0937
陈桥( ), 肖明玮, 罗陈迪, 高嘉正, 欧阳春凡, 曾春林, 李文涛, 周学成()
), 肖明玮, 罗陈迪, 高嘉正, 欧阳春凡, 曾春林, 李文涛, 周学成()
收稿日期:2023-12-28
接受日期:2024-03-22
出版日期:2025-05-15
发布日期:2025-05-20
通讯作者:
周学成
作者简介:陈桥 E-mail:az1016875977@163.com;
基金资助:
Qiao CHEN(), Mingwei XIAO, Chendi LUO, Jiazheng GAO, Chunfan OUYANG, Chunlin ZENG, Wentao LI, Xuecheng ZHOU()
Received:2023-12-28
Accepted:2024-03-22
Online:2025-05-15
Published:2025-05-20
Contact:
Xuecheng ZHOU
摘要:
针对火龙果生长环境复杂、生长姿态多样、枝条内茎剪切强度大、果蒂附近果皮易损伤等采摘难题,设计了一种椭圆夹爪剪切式火龙果采摘末端执行器,能够对不同生长姿态下的火龙果进行无损采摘。椭圆夹爪可以将火龙果果实与枝条分隔,保护果实的完整;通过在椭圆夹爪上开V型槽来适应不同倾角的火龙果,防止枝条对夹持动作的阻碍;采用先剪后拉的方法采摘火龙果。对夹持和剪切机构进行力学分析,通过剪切试验测得最小剪切力为33.5 N,对动力源进行选型。建立了剪切后火龙果拉力采摘模型,经过有限元分析和果园人工剪切后的拉力试验对比,测得平均拉力为20 N,不会对果实造成损伤。构建了物理样机,并对其进行了15次夹持试验和25次果园实地剪切试验,结果表明,末端执行器的可采摘范围远大于现有火龙果定位精度,采摘火龙果倾角为50°~90°,平均采摘时间为3.1 s,采摘成功率为92%,切下的叶片平均长度为55.3 mm,能够满足采摘需求。
中图分类号:
陈桥, 肖明玮, 罗陈迪, 高嘉正, 欧阳春凡, 曾春林, 李文涛, 周学成. 椭圆夹爪剪切式火龙果采摘末端执行器设计[J]. 中国农业科技导报, 2025, 27(5): 113-121.
Qiao CHEN, Mingwei XIAO, Chendi LUO, Jiazheng GAO, Chunfan OUYANG, Chunlin ZENG, Wentao LI, Xuecheng ZHOU. Design of Shear End Effector for Dragon Fruit Picking Based on Oval Claw[J]. Journal of Agricultural Science and Technology, 2025, 27(5): 113-121.
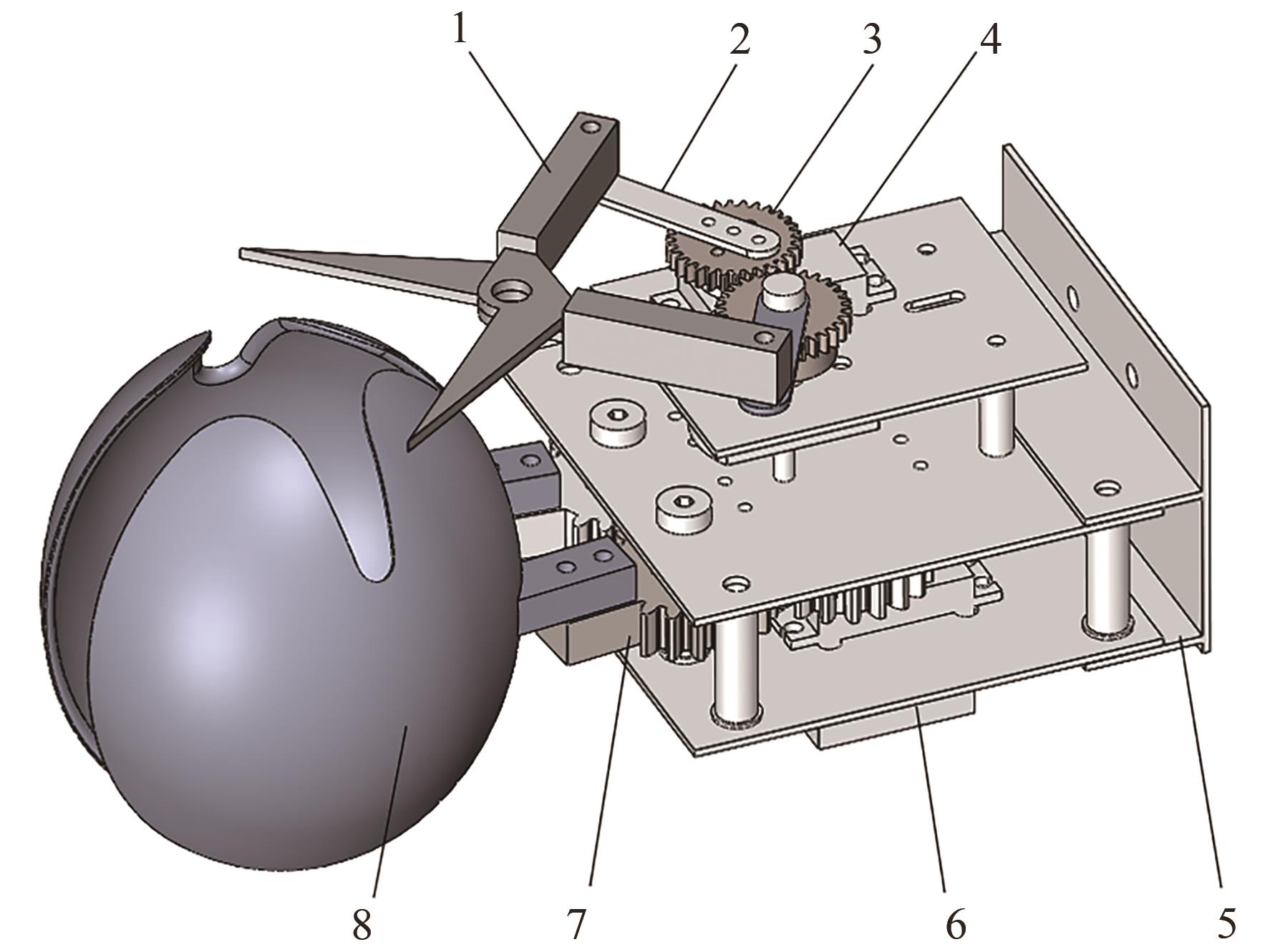
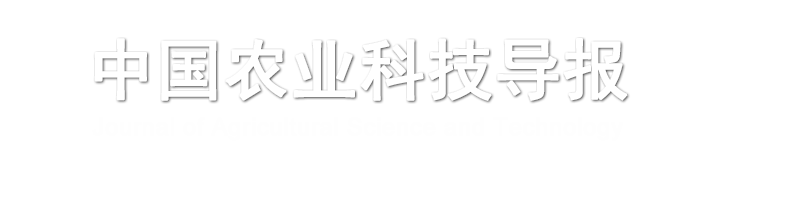
图1 火龙果采摘末端执行器机构注:1—剪刀;2—连杆;3—剪切驱动齿轮;4—剪切驱动舵机;5—手腕连接件;6—夹持驱动舵机;7—剪切驱动齿轮;8—椭圆夹爪。
Fig. 1 Structure of the end effector of dragon fruit pickingNote:1—Scissors; 2—Connecting rod; 3—Gear wheel; 4—Steering engine; 5—Mechanical arm connector; 6—Steering engine; 7—Gear wheel; 8—Oval jaw.
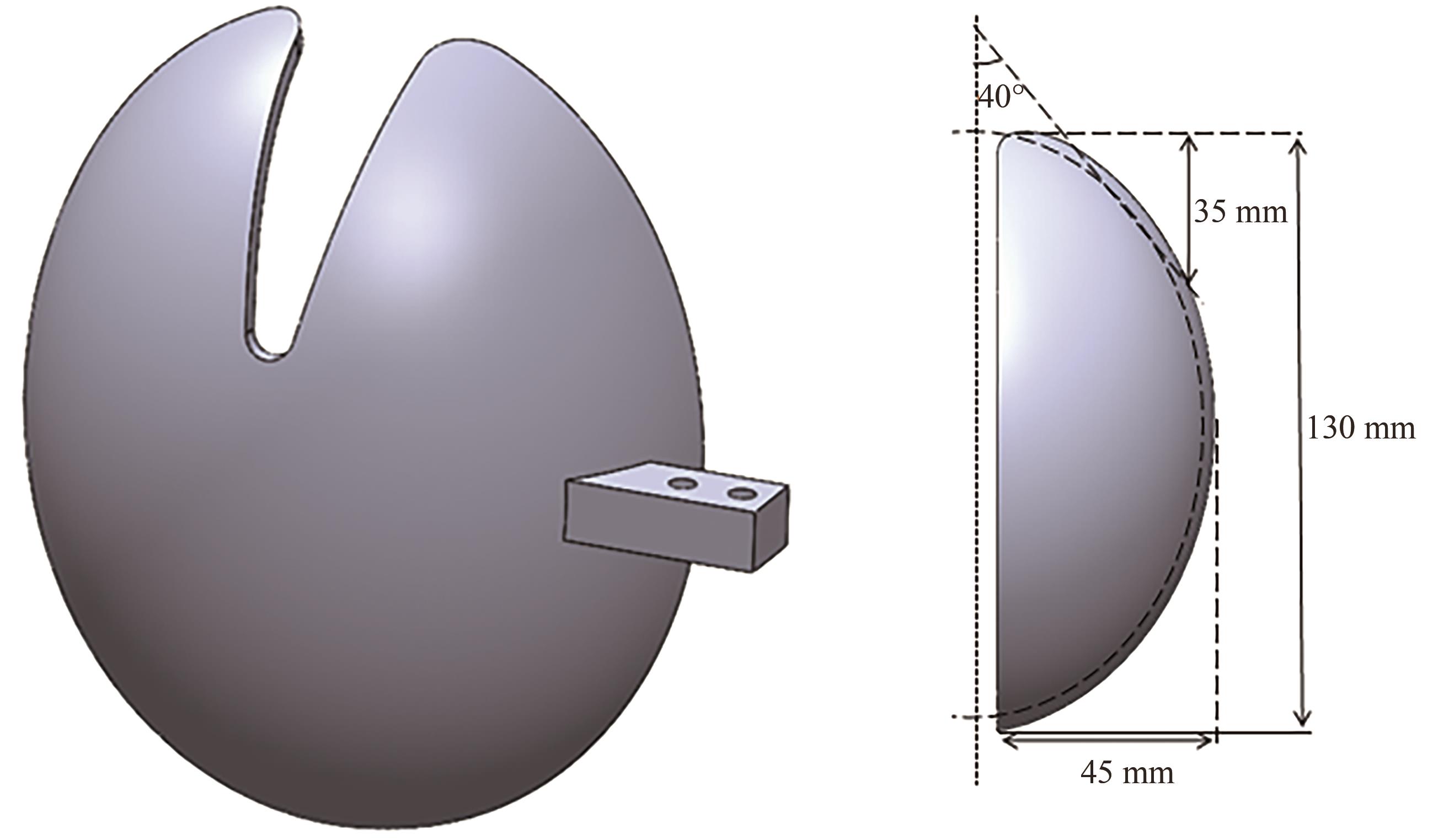
图2 椭圆夹爪结构
Fig. 2 Oval claw structure

图3 夹持机构力学分析
Fig. 3 Mechanical analysis of clamping mechanism
图4 剪切机构力学分析
Fig. 4 Mechanical analysis diagram of shear mechanism
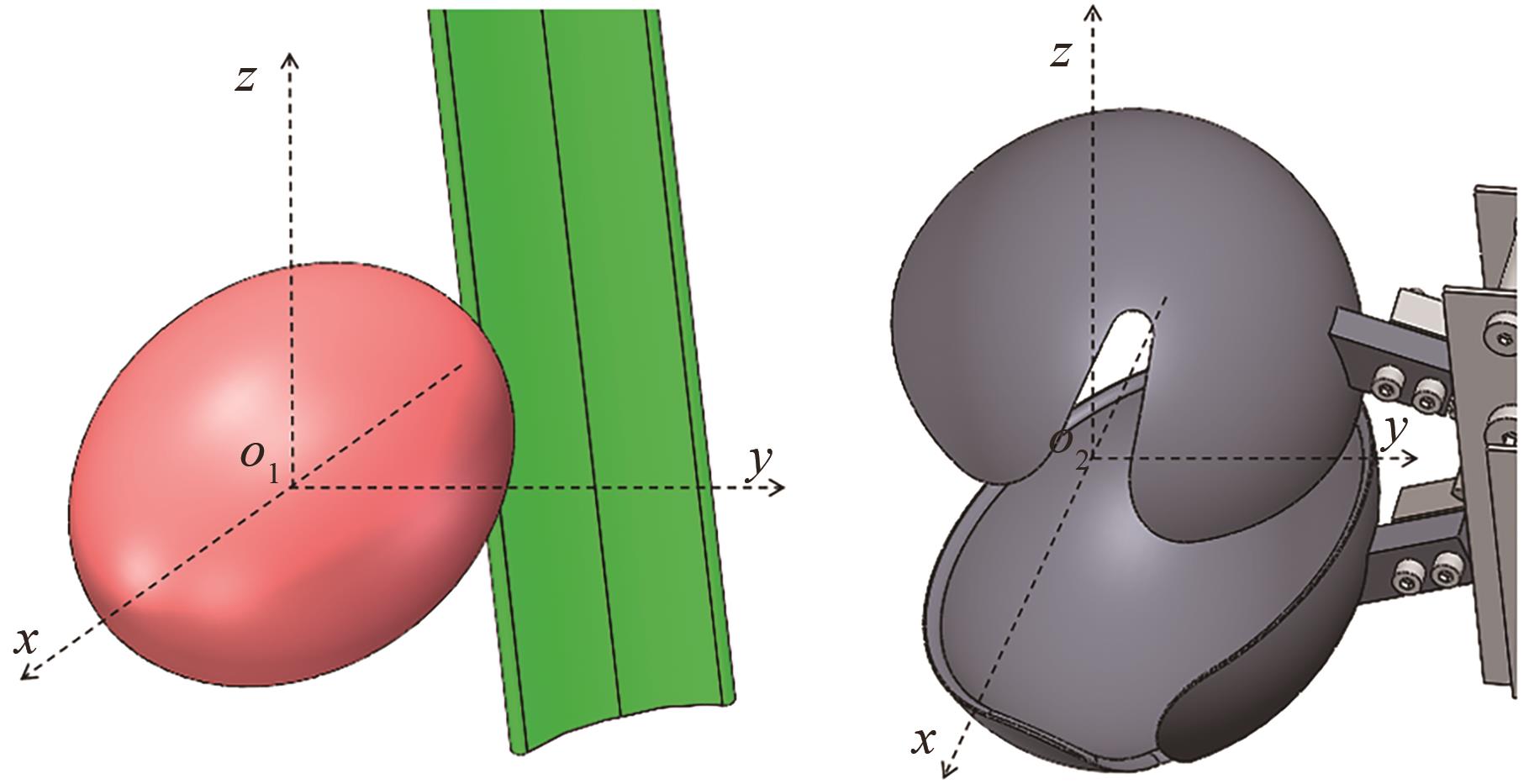
图5 火龙果与夹爪相对位置
Fig. 5 Relative position of dragon fruit and claw
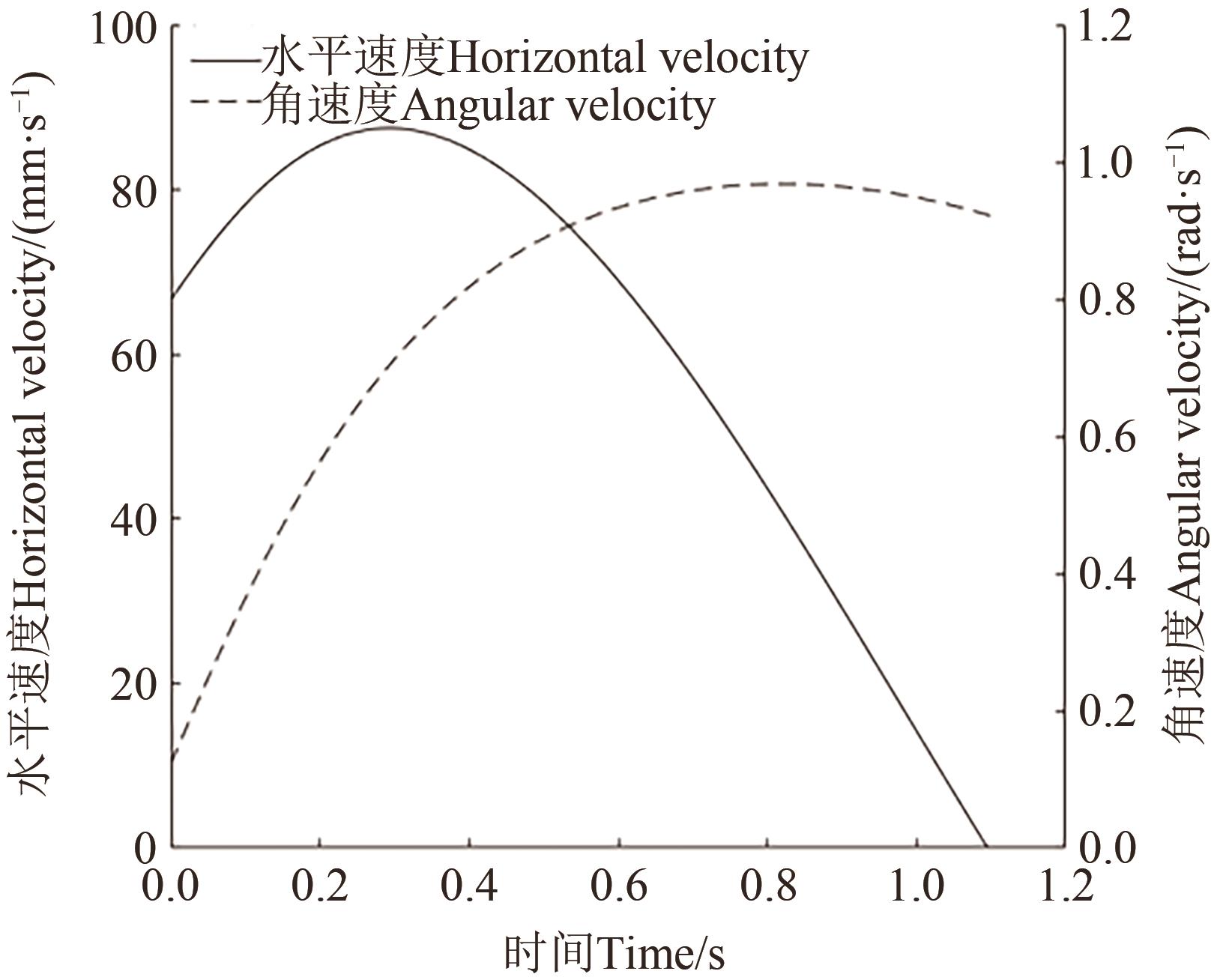
图6 剪刀水平速度和角速度变化曲线
Fig. 6 Horizontal and angular velocity curves of scissors
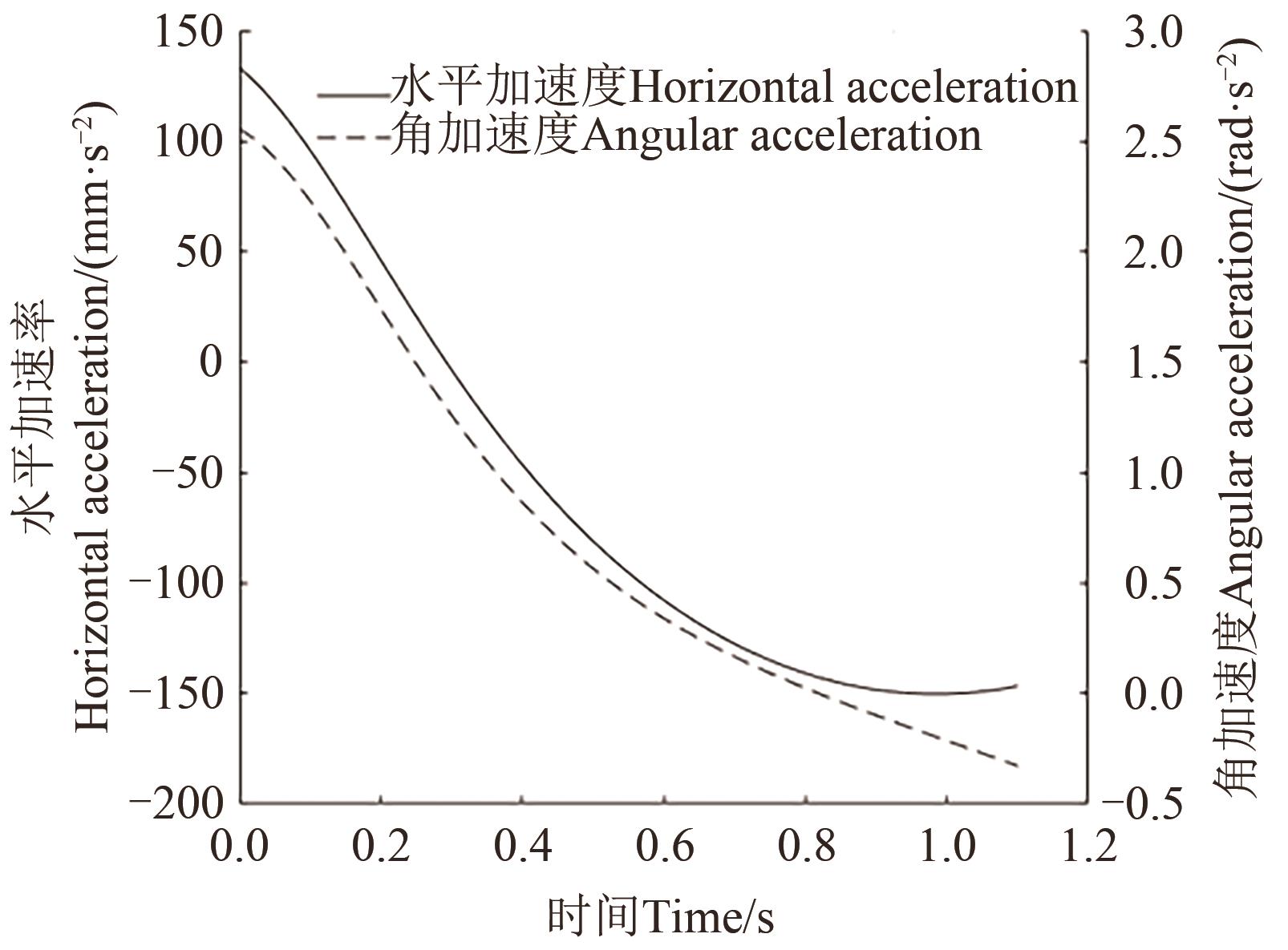
图7 剪刀水平加速度和角加速度变化曲线
Fig. 7 Curve of horizontal and angularacceleration of scissors
序号 Number | 果梗直径 Stem diameter/mm | 加载速度Loading speed/ (mm·min-1) | 最大剪切力 Maximum shear force/N |
|---|---|---|---|
| 1 | 4.24 | 10 | 35.64 |
| 2 | 5.24 | 10 | 46.67 |
| 3 | 5.47 | 10 | 44.89 |
| 4 | 4.56 | 10 | 67.10 |
| 5 | 4.05 | 10 | 38.03 |
| 6 | 4.5 | 10 | 34.56 |
| 7 | 4.05 | 20 | 38.17 |
| 8 | 5.23 | 20 | 63.82 |
| 9 | 5.10 | 20 | 46.38 |
| 10 | 4.65 | 20 | 47.12 |
| 11 | 4.70 | 20 | 51.89 |
| 12 | 4.53 | 20 | 44.23 |
| 13 | 4.10 | 50 | 32.06 |
| 14 | 4.93 | 50 | 61.29 |
| 15 | 5.04 | 50 | 45.78 |
| 16 | 4.91 | 50 | 43.84 |
| 17 | 4.83 | 50 | 39.37 |
| 18 | 4.48 | 50 | 48.46 |
| 19 | 4.11 | 80 | 35.04 |
| 20 | 4.90 | 80 | 46.97 |
| 21 | 4.95 | 80 | 43.54 |
| 22 | 5.10 | 80 | 41.60 |
| 23 | 4.63 | 80 | 44.44 |
| 24 | 4.20 | 80 | 48.46 |
表1 火龙果单刀剪切试验结果
Table 1 Results of single knife shear test of dragon fruit
序号 Number | 果梗直径 Stem diameter/mm | 加载速度Loading speed/ (mm·min-1) | 最大剪切力 Maximum shear force/N |
|---|---|---|---|
| 1 | 4.24 | 10 | 35.64 |
| 2 | 5.24 | 10 | 46.67 |
| 3 | 5.47 | 10 | 44.89 |
| 4 | 4.56 | 10 | 67.10 |
| 5 | 4.05 | 10 | 38.03 |
| 6 | 4.5 | 10 | 34.56 |
| 7 | 4.05 | 20 | 38.17 |
| 8 | 5.23 | 20 | 63.82 |
| 9 | 5.10 | 20 | 46.38 |
| 10 | 4.65 | 20 | 47.12 |
| 11 | 4.70 | 20 | 51.89 |
| 12 | 4.53 | 20 | 44.23 |
| 13 | 4.10 | 50 | 32.06 |
| 14 | 4.93 | 50 | 61.29 |
| 15 | 5.04 | 50 | 45.78 |
| 16 | 4.91 | 50 | 43.84 |
| 17 | 4.83 | 50 | 39.37 |
| 18 | 4.48 | 50 | 48.46 |
| 19 | 4.11 | 80 | 35.04 |
| 20 | 4.90 | 80 | 46.97 |
| 21 | 4.95 | 80 | 43.54 |
| 22 | 5.10 | 80 | 41.60 |
| 23 | 4.63 | 80 | 44.44 |
| 24 | 4.20 | 80 | 48.46 |
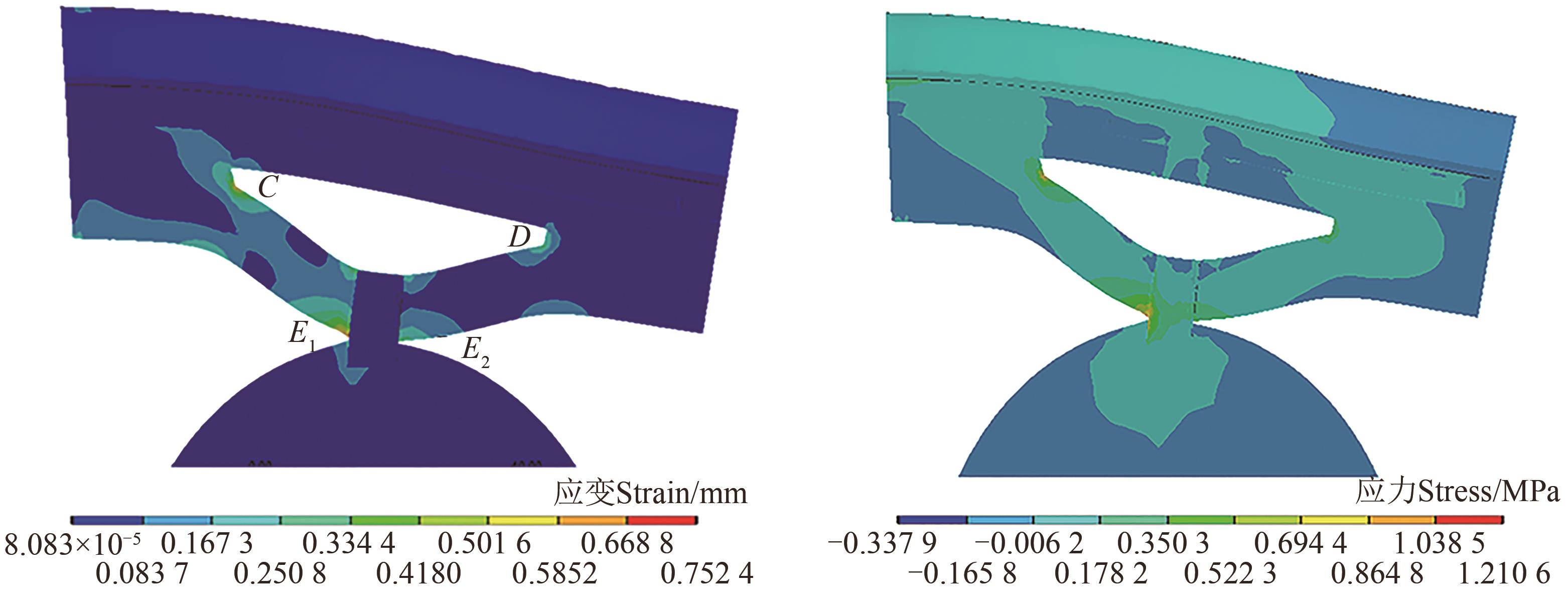
图8 剪切后的火龙果受拉的应力应变分布A:等效应变分布;B:垂直受拉应力分布
Fig. 8 Stress-strain distribution of the strained dragon fruit after shearA: Equivalent strain distribution; B:Vertical tensile stress
序号 Number | 果实尺寸 Fruit size/mm | 切痕长度 Cut length/mm | 拉力 Tension/N | 叶片组织长度 Leaf tissue length/mm |
|---|---|---|---|---|
| 1 | 63.7×81.0 | 43.3 | 16.0 | 58.4 |
| 2 | 67.3×76.3 | 45.4 | 25.5 | 40.7 |
| 3 | 61.0×73.6 | 49.0 | 25.5 | 40.8 |
| 4 | 73.4×90.3 | 54.2 | 22.0 | 54.1 |
| 5 | 66.2×93.1 | 47.2 | 18.0 | 33.1 |
| 6 | 70.8×81.1 | 50.1 | 22.5 | 58.9 |
| 7 | 62.0×78.4 | 46.8 | 18.0 | 41.6 |
| 8 | 64.5×77.0 | 54.2 | 17.0 | 38.3 |
| 9 | 61.0×71.1 | 46.5 | 20.0 | 45.4 |
| 10 | 71.5×79.8 | 58.0 | 23.0 | 63.7 |
| 11 | 83.0×100.5 | 47.4 | 21.0 | 43.1 |
| 12 | 86.0×104.0 | 51.3 | 19.0 | 53.6 |
| 13 | 87.0×105.1 | 55.2 | 23.5 | 59.4 |
| 14 | 89.0×107.3 | 48.1 | 22.0 | 55.3 |
| 15 | 78.3×99.4 | 45.3 | 16.5 | 32.5 |
| 16 | 75.8×94.2 | 40.6 | 20.5 | 41.7 |
| 17 | 70.0×90.0 | 52.1 | 17.5 | 53.7 |
| 18 | 73.0×92.0 | 46.2 | 15.5 | 32.1 |
| 19 | 67.0×88.1 | 44.3 | 17.0 | 47.6 |
| 20 | 64.5×84.3 | 43.5 | 19.5 | 46.3 |
表2 切后火龙果拉力测量试验结果
Table 2 Test results of cutting dragon fruit tension
序号 Number | 果实尺寸 Fruit size/mm | 切痕长度 Cut length/mm | 拉力 Tension/N | 叶片组织长度 Leaf tissue length/mm |
|---|---|---|---|---|
| 1 | 63.7×81.0 | 43.3 | 16.0 | 58.4 |
| 2 | 67.3×76.3 | 45.4 | 25.5 | 40.7 |
| 3 | 61.0×73.6 | 49.0 | 25.5 | 40.8 |
| 4 | 73.4×90.3 | 54.2 | 22.0 | 54.1 |
| 5 | 66.2×93.1 | 47.2 | 18.0 | 33.1 |
| 6 | 70.8×81.1 | 50.1 | 22.5 | 58.9 |
| 7 | 62.0×78.4 | 46.8 | 18.0 | 41.6 |
| 8 | 64.5×77.0 | 54.2 | 17.0 | 38.3 |
| 9 | 61.0×71.1 | 46.5 | 20.0 | 45.4 |
| 10 | 71.5×79.8 | 58.0 | 23.0 | 63.7 |
| 11 | 83.0×100.5 | 47.4 | 21.0 | 43.1 |
| 12 | 86.0×104.0 | 51.3 | 19.0 | 53.6 |
| 13 | 87.0×105.1 | 55.2 | 23.5 | 59.4 |
| 14 | 89.0×107.3 | 48.1 | 22.0 | 55.3 |
| 15 | 78.3×99.4 | 45.3 | 16.5 | 32.5 |
| 16 | 75.8×94.2 | 40.6 | 20.5 | 41.7 |
| 17 | 70.0×90.0 | 52.1 | 17.5 | 53.7 |
| 18 | 73.0×92.0 | 46.2 | 15.5 | 32.1 |
| 19 | 67.0×88.1 | 44.3 | 17.0 | 47.6 |
| 20 | 64.5×84.3 | 43.5 | 19.5 | 46.3 |
尺寸 Size/mm | 数量 Quantity | +x方向 +x direction/mm | +y方向 +y direction/mm | +z方向 +z direction/ mm |
|---|---|---|---|---|
| 90x×68 | 5 | [19.0,33.0] | [0,22.0] | [-26.2,+49.8] |
| 98×78 | 5 | [15.0,31.5] | [0,17.0] | [-18.0,+44.2] |
| 110×90 | 5 | [9.0,20.5] | [0,15.0] | [-8.4,+38.8] |
表3 采摘范围试验结果
Table 3 Clamp test results
尺寸 Size/mm | 数量 Quantity | +x方向 +x direction/mm | +y方向 +y direction/mm | +z方向 +z direction/ mm |
|---|---|---|---|---|
| 90x×68 | 5 | [19.0,33.0] | [0,22.0] | [-26.2,+49.8] |
| 98×78 | 5 | [15.0,31.5] | [0,17.0] | [-18.0,+44.2] |
| 110×90 | 5 | [9.0,20.5] | [0,15.0] | [-8.4,+38.8] |
| 1 | 王蔚婕,唐道邦,曹清明,等.火龙果的营养价值及加工现状[J].中国食物与营养,2019,25(4):27-30. |
| WANG W J, TANG D B, CAO Q M, et al.. Research advancement of nutritional value and processing of pitaya [J]. Food Nutr. China, 2019,25(4):27-30. | |
| 2 | 李靓,朱涵彬,袁晓晴,等.火龙果营养成分及保健功能的研究[J].现代食品,2020,5(10):26-28. |
| LI J, ZHU H B, YUAN X Q, et al.. Study on nutritional composition and healthy function of pitaya fruit [J]. Mod. Food, 2020,5(10):26-28. | |
| 3 | 徐磊磊,金琰,侯媛媛,等.我国火龙果市场与产业调查分析报告[J].农产品市场,2021(8):43-45. |
| XU L L, JIN Y, HOU Y Y, et al.. Chinese dragon fruit market and Industry survey and analysis report [J]. Agric. Products Market., 2021(8): 43-45. | |
| 4 | 卜令昕.结构化果园苹果收获机器人关键技术研究[D].杨凌:西北农林科技大学,2021. |
| BU L X. Key technologies of robotic apple harvester in constructed orchard [D]. Yangling: Northwest A&F University, 2021. | |
| 5 | 苗玉彬,郑家丰.苹果采摘机器人末端执行器恒力柔顺机构研制[J].农业工程学报,2019,35(10):19-25. |
| MIAO Y B, ZHENG J F. Development of compliant constant-force mechanism for end effector of apple picking robot [J]. Trans. Chin. Soc. Agric. Eng., 2019,35(10):19-25. | |
| 6 | 于丰华,周传琦,杨鑫,等.日光温室番茄采摘机器人设计与试验[J].农业机械学报,2022,53(1):41-49. |
| YU F H, ZHOU C Q, YANG X, et al.. Design and experiment of tomato picking robot in solar greenhouse [J]. Trans. Chin. Soc. Agric. Mach., 2022,53(1):41-49. | |
| 7 | HOHIMER C J, WANG H, BHUSAL S, et al.. Design and field evaluation of a robotic apple harvesting system with a 3D-Printed Soft-Robotic End-Effector [J]. Trans. ASABE, 2019,62(2):405-414. |
| 8 | XIE H. Optimization and experimental study of structural parameters of compliant end-effector for robotic cherry tomato harvesting [J]. Appl. Eng. Agric., 2022,38(3):617-625. |
| 9 | GOULART R, JARVIS D, WALSH K B. Evaluation of end effectors for robotic harvesting of mango fruit [J]. Sustainability, 2023, 15(8): 6769. |
| 10 | 魏博,何金银,石阳,等.欠驱动式柑橘采摘末端执行器设计与试验[J].农业机械学报,2021,52(10):120-128. |
| WEI B, HE J Y, SHI Y, et al.. Design and experiment of underactuated end-effector for Citrus picking [J].Trans. Chin. Soc. Agric. Mach., 2021,52(10):120-128. | |
| 11 | 虞浪,俞高红,吴浩宇,等. 欠驱动关节型柑橘采摘末端执行器设计与试验[J]. 农业工程学报,2023,17(39): 1-10. |
| YU L, YU G H, WU H Y, et al.. Design and experiment of the end-effector with underactuated articular for citrus picking [J]. Trans. Chin. Soc. Agric. Eng., 2023, 39(17): 29-38. | |
| 12 | 邓小雷,罗忠祎,庞景权,等.仿生无损吸取式苹果采摘装置的设计与试验[J].中国农业大学学报,2019,24(10):100-108. |
| DENG X L, LUO Z Y, PANG J Q, et al.. Design and experiment of bionic nondestructive handheld suction apple picker [J]. J. China Agric. Univ., 2019,24(10):100-108. | |
| 13 | ZHANG K X, LAMMERS K, CHU P Y, et al.. System design and control of an apple harvesting robot [J/OL]. Mechatronics, 2021,79:102644 [2024-09-23]. . |
| 14 | 姬江涛,李梦松,赵凯旋,等.双孢菇柔性仿形采摘末端执行器设计与试验[J].农业机械学报,2023,54(1):104-115. |
| JI J T, LI M S, ZHAO K X, et al.. Design and experiment of flexible profiling picking end-effector for Agaricus bisporus [J]. Trans. Chin. Soc. Agric. Mach., 2023,54(1):104-115. | |
| 15 | 戎毫.基于果梗分离采摘方式的猕猴桃采摘末端执行器研制[D].杨凌:西北农林科技大学,2019. |
| RONG H. Development of end-effector for picking kiwi fruit based on fruit stem separation and picking method [D]. Yangling: Northwest A & F University, 2019. | |
| 16 | 陈真真.南疆苹果采摘机械系统末端执行器的设计与研究[D].塔里木:塔里木大学,2016. |
| CHEN Z Z. Design and research of end-effector of apple picking mechanical system in southern Xinjiang [D]. Turim: Tarim University,2016. | |
| 17 | 李健,戴楚彦,王扬威,等.基于草莓轮廓曲线的单指软体采摘抓手设计与优化[J].浙江大学学报(工学版). 2022,56(6):1088-1096, 1134. |
| LI J, DAI C Y, WANG Y W, et al.. Design and optimization of single-finger soft grasp based on strawberry curve [J]. J. Zhejiang Univ. (Eng. Technol.), 2022,56(6):1088-1096, 1134. | |
| 18 | 鲍秀兰,马志涛,马萧杰,等.丘陵果园自然环境下柑橘采摘机器人设计与试验[J].农业机械学报,2024,55(4):124-135. |
| BAO X L, MA Z T, MA X J, et al.. Design and experiment of citrus picking robot in hilly orchard natural environment [J]. Trans. Chin. Soc. Agric. Mach., 2024,55(4):124-135. | |
| 19 | 吴华昕.黄瓜智能采摘机器人关键技术研究[D].扬州:扬州大学,2021. |
| WU H X. Research on key technologies of cucumber intelligent picking robot [D]. Yangzhou: Yangzhou University, 2021. | |
| 20 | HABEGGER R, BERGAMO E, SCHWAB W, et al.. Impact of intensive modification of sweet pepper plants on performance of end effectors for autonomous harvesting [J]. Eur. J. Hortic. Sci., 2021,86(4):354-359. |
| 21 | 肖旭. 柑橘采摘机器人的采摘关键技术研究与试验[D].长沙:湖南农业大学, 2022. |
| XIAO X. Research and experiment on picking key technology of citrus picking robot [D]. Changsha:Hunan Agricultural University, 2022. | |
| 22 | 王毅. 柑橘采摘机器人咬合式末端执行器关键技术研究[D].重庆:重庆大学, 2019. |
| WANG Y. Research on key technologies of occluding end-effector for citrus picking robot [D]. Chongqing: Chongqing University, 2019. | |
| 23 | 陈建能,李杭,刘林敏,等.分体刀具式名优茶采摘末端执行器设计与试验优化[J]. 农业机械学报,2024,55(1): 39-46, 195. |
| CHEN J N, LI H, LIU L M, et al.. Design and experimental optimization of end effector for picking famous premium tea with split-cutter [J]. Trans. Chin. Soc. Agric. Mach., 2024,55(1):39-46, 195. | |
| 24 | 徐丽明,刘旭东,张凯良,等.脐橙采摘机器人末端执行器设计与试验[J].农业工程学报,2018,34(12):53-61. |
| XU L M, LIU X D, ZHANG K L, et al.. Design and test of end-effector for navel orange picking robot [J]. Trans. Chin. Soc. Agric. Eng., 2018,34(12):53-61. | |
| 25 | 罗茂珍,刘艳芝,张雪松,等.火龙果的特征特性及其温室盆栽配套技术[J].果树实用技术与信息,2021,(1):24-29. |
| 26 | 张瀚,杨福孙,胡文斌,等.火龙果果实生长及内含物变化规律[J].江苏农业科学,2022,50(11):161-168. |
| ZHANG H, YANG F S, HU W B, et al.. Changes of fruit growth and contents of pitaya [J]. Jiangsu Agric. Sci., 2022, 50(11): 161-168. | |
| 27 | 张跃跃.火龙果采摘机器人末端执行器关键技术的研究与设计[D]. 南京:南京林业大学, 2023. |
| ZHANG Y Y. Research and design of key technologies of end-effector for dragon fruit picking robot [D]. Nanjing: Nanjing Forestry University, 2023. | |
| 28 | 周佳良. 基于深度学习的复杂采摘环境下火龙果位姿识别与控制系统研究[D]. 南京:南京林业大学, 2023. |
| ZHOU J L. Research on position recognition and control system of dragon fruit in complex picking environment based on deep learning [D]. Nanjing:Nanjing Forestry University, 2023. | |
| 29 | ZHOU J, ZHANG Y, WANG J. RDE-YOLOv7: An improved model based on YOLOv7 for better performance in detecting dragon fruits [J/OL]. Agronomy, 2023,13(4):1042 [2024-09-23]. . |
| [1] | 欧阳春凡, 高嘉正, 陈桥, 曾春林, 李文涛, 肖明玮, 罗陈迪, 周学成. 大视场下火龙果目标检测与计数方法[J]. 中国农业科技导报, 2025, 27(8): 100-109. |
| [2] | 郑杰, 陈红, 孟令剑, 李善军, 马露畅. 不同类型灌水器滴头对沼液抗堵塞性能的影响[J]. 中国农业科技导报, 2022, 24(7): 108-116. |
| [3] | 王忠云1,喻阳华2*,王芊姿1. 养分管理措施对干热河谷火龙果土壤肥力的影响[J]. 中国农业科技导报, 2020, 22(11): 176-186. |
| [4] | 王冰洁1,潘波1,姜蕾1,林勇1*,赵帅2,莫宇星2. 植保无人机作业参数对雾滴在火龙果树冠层沉积分布的影响[J]. 中国农业科技导报, 2020, 22(10): 101-109. |
| [5] | 王毅,张茂,刘波,刘洒,何宇,许洪斌*. 柑橘采摘机器人末端执行器夹持机构设计与实验[J]. 中国农业科技导报, 2019, 21(4): 61-69. |
| [6] | 张哲1,王毅1,2*,付舜1,马冀桐1. 基于咬合型末端执行器的柑橘采摘机器人采摘姿态研究[J]. 中国农业科技导报, 2018, 20(5): 75-82. |
| [7] | 王毅1,2,付舜2,张哲2,马冀桐2,许洪斌1,2*. 柑橘采摘机器人末端执行器设计与试验[J]. 中国农业科技导报, 2018, 20(1): 69-77. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||